等候中的居留权
")
长期以来,人们一直希望水下航行器能够在不依赖水面舰艇的情况下支持海底作业。我们比以往任何时候都更接近于这一愿景,但是要实现这一目标,以前没有哪些新功能?
今年早些时候,石油和天然气业务中的水下车辆达到了一个里程碑。在瑞典的一个湖泊中进行演示时,无人驾驶水下航行器(AUV)以无线方式对接,充电和下载数据,并具有远程自动控制和实时可视控制。码头是Equinor的开放式标准海底扩展坞(SDS),运输工具是Saab Seaeye的Sabertooth。
这是使车辆永久居住在海底的一步,随着其他人对其新车辆进行测试,更多的此类示威活动即将到来。但是,有人会说我们以前来过这里。这是在1990年代尝试过的。那么,有什么新消息?它是各种力量的组合-市场驱动和技术驱动。
对于Equinor的海底干预和管道维修经理Gro Stakkestad来说,这是低迷,自动化的动力和对环境意识的增强的结合。 Oceaneering欧洲新兴技术总监SteffanLindsø表示,海上通讯已成为缺少的主要要素,同时也是电池和导航技术的进步,而新进入市场的Houston Mechatronics产品管理和营销总监Sean Halpin则表示,他说降低成本和获得计算能力是重要的推动力。向所有电场基础设施发展也将有所帮助。
最后一块
对于萨博(Saab)Seaeye的首席工程师JanSiesjö而言,将对接,充电和数据下载结合在一起是将这一功能带入现场的最后一步。但是,在后台还有很多其他工作,主要涉及远程控制功能。
“远程控制似乎很简单,但要使其可靠,您需要准备很多东西。这不仅仅是在互联网上发送命令,它还拥有可以确保自身安全,可以维护的系统,这样它们就不会出错,并且如果出现问题,也并不复杂,您需要大学级工程师对其进行修复。”包括站位保持,航点导航和避障。
在通信方面,Saab Seaeye一直在与波音公司合作,在全美国的卫星链路上运行Leopard轻型作业级水下机器人(ROV),进行机械手工作,配合连接器,飞行任务,航点控制等。” Siesjö说:“我们有一些非常严格的限制,只有1mb / sec,并且延迟增加了三秒钟,我们故意弄乱了数据质量。” “尽管如此,我们能够配合飞线连接器并做很多其他事情。较长期的目标是将ROV从非常大型的AUV中抽出,并以各种方式进行干预。”
 Saab Seaeye的Sabertooth于今年早些时候在瑞典展示了感应充电和数据下载。 (照片:萨博·希耶(Saab Seaye))
Saab Seaeye的Sabertooth于今年早些时候在瑞典展示了感应充电和数据下载。 (照片:萨博·希耶(Saab Seaye))
深入工作是另一个挑战–既要到达站点,又要保持通信链接。今年早些时候,萨博(Saab Seaeye)对这种情况进行了试验,在地中海2400米水深处进行了为期三周的测试(系绳和自动驾驶),即使在最大推力达4节的情况下,也能100%成功地与车辆通信和定位。西耶在这些深度上的工作包括确定如何有效地到达工作地点-距离2400米很远-在使用惯性导航系统(INS)和超短基线(USBL)定位相结合的同时保持定位的同时。
萨博(Saab Seaeye)正在使用高保真模拟器(例如用于测试其母公司的战斗机的模拟器)来支持其工作,因此它可以使用其本机控制软件来运行所有自主的和在环控制系统,并确定它们是否有效–很久以后他们才下水。
此外,它还在研究如何通过使用立体摄像头系统执行3D同时定位和地图绘制(SLAM)的方式,实时构建车辆所在环境的3D地图。这将使车辆导航并测量相对于自身的可见物体。萨博(Saab Seaeye)自2018年以来一直在测试此功能,以构建水下世界的3D云。
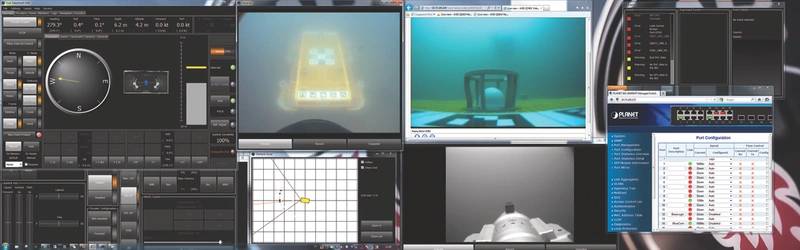 通过简单易用的高级遥控器,演示了对接,并向岸上提供了实时视频。图片:萨博·西耶(Saab Seaye)
通过简单易用的高级遥控器,演示了对接,并向岸上提供了实时视频。图片:萨博·西耶(Saab Seaye)
Geosub到AIV
一段时间以来,另一家已经建立了这种功能的公司是Subsea7。在1990年代,它落后于Geosub,后者是获得国家海洋学中心(NOC)的Subsea 7许可的技术。它的主要目标是自动管道检查,使用航点导航和自动跟踪来提高海底测量数据的收集质量和效率,并减少水面船只的支持。尽管在数据质量方面取得了成功,但仍必须从船上启动和恢复它,并且需要表面支撑以进行定位。它也无法进行阴极保护测量,因此受到限制。
Subsea 7通过其i-Tech 7业务不断发展,现在拥有自主检查工具(AIV),其重定位功能是其前身Prototype AIV所开发的,因此它不需要固定位置来自水面舰艇的更新。 “这项发展是由决定转向自动悬停车辆引发的,该能力集中在现场海底基础设施检查上。由于现在的目的是集中于检查现有设备,因此可以跟踪设备本身以提供导航所需的高精度位置,而无需水面舰艇进行更新。“它与自动跟踪器相似,但是以3D形式存在,可以描述为一种SLAM。
AIV还拥有自己的海底对接系统,该系统可将船舶的下水和回收作业与船只断开。贾米森说:“简化的任务计划的引入,与重新定位的动力导航相联系,而AIV可以自行停靠在吊篮上的过程有效地打破了与船只依赖的联系。”
 ROV也正在进行远程操作。这是i-Tech 7的ROV操作陆上控制中心。 (照片:i-Tech 7)
ROV也正在进行远程操作。这是i-Tech 7的ROV操作陆上控制中心。 (照片:i-Tech 7)
标准化对接
该领域的一大推动力来自Equinor等公司的愿景,即所谓的“水下干预无人机”(UID)的愿景,并授予合同,包括设计任何车辆均可使用的开放标准SDS。 。 SDS设计包含来自Blue Logic和WiSub的感应连接器以及AruCo和ChaRuCo标记,无人机的摄像头可以看到它们的相对位置。位于特隆赫姆的声学通信和定位公司Water Linked还提供了小型声学调制解调器,用于将车辆定位到电台。 SDS还可以容纳其他传感器,例如Sonardyne的BlueComm自由空间光学调制解调器,用于实时视频输入或高带宽数据下载。还有通过SWiG(水下无线接口组)小组和Deepstar开发的标准接口,用于机械师。
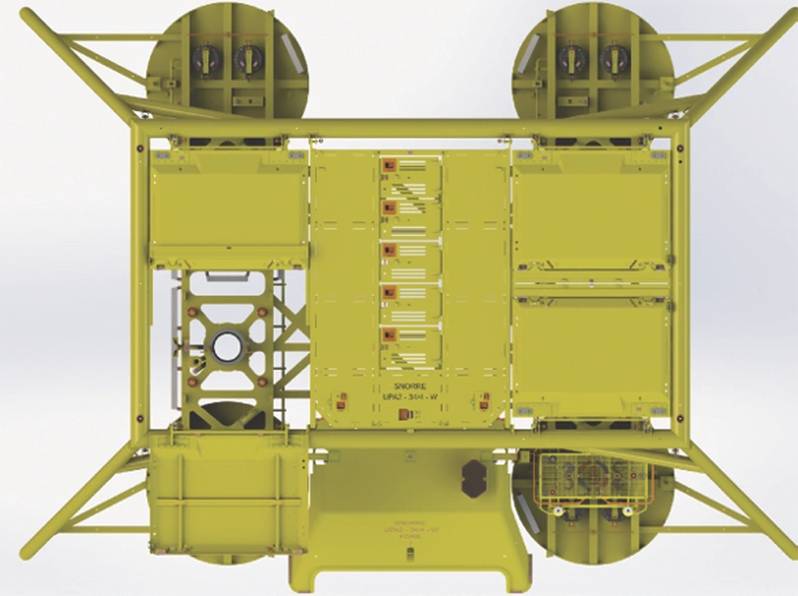 Equinor的开放标准海底扩展坞设计如图所示,可以像许多小型直升机停机坪一样插入歧管。图片:蓝色逻辑)
Equinor的开放标准海底扩展坞设计如图所示,可以像许多小型直升机停机坪一样插入歧管。图片:蓝色逻辑)
由挪威的Blue Logic建造的SDS已部署在特隆赫姆的一个码头上,并且在特隆赫姆生物站离岸2.2公里,水深350米的地方。另一个将进入Åsgard领域,一台Eelume的“蛇机器人”将在连接到ÅsgardA浮动生产单元的电源和光纤束线上工作。下一步包括在Snorre扩展项目中进行更广泛的部署,在该项目中,可以使用相距15公里的七个SDS(集成到歧管中或独立于玻璃纤维防护罩),并在现场布局中连接到电源和通信中。
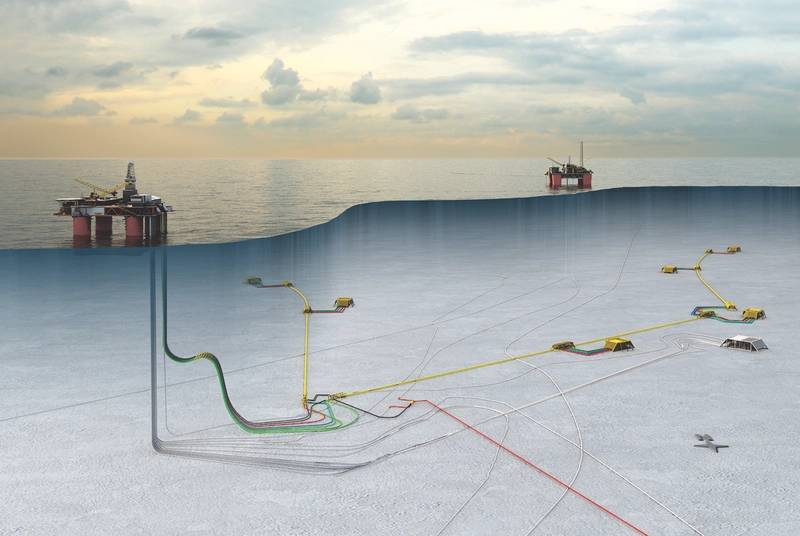 Snorre扩展项目的现场布局,很快就会得到水下无人机的支持。图片:Equinor)
Snorre扩展项目的现场布局,很快就会得到水下无人机的支持。图片:Equinor)
开发新模型
杰米森说,这些发展现在正在影响新的绿地发展计划的方式。实际上,i-Tech 7已在挪威海的Snorre扩展项目(SEP)和Snorre A(SNA)领域以及其他领域使用UID研究了Equinor的整个IRM服务。
该研究通过确定任何可能阻止UID在海床上长期部署的技术差距,评估了引入水下混合动力汽车的潜力。它还通过提供所需配置和特性的概述,评估并推荐了扩展坞配置选项,以支持车辆。由于动力和可靠的数据网络是其成功不可或缺的一部分,该公司检查了运营和管理规定,以支持水下混合动力汽车的活动。该项目的最终目的是提出一项发展计划,以使无人机在2020年末“投入使用”。
Jamieson说:“由海底坞站支持的海底托管车辆,用于自主检查并与陆上控制室相连,对干预任务中的人员进行回路控制,这再次以积极的方式推动了需求,” Jamieson说。 “车辆将必须一次在海底停留数月,且无需维修或修理。更高的可靠性和控制力还使传统的ROV运营成为可能,可通过陆上控制中心对车辆进行远程控制,并使车辆电气化,从而提高可靠性和效率。”所有这些加起来减少了船员的工作日,减少了离岸人员。
有可能简化海底系统。除了在安全关键系统上使用的致动器,可以是手动的,而不是液压或电动的,从而减少了需要在海底安装的液压和电气系统-这意味着更少的电缆。
Blue Logic业务经理Helge Sverre Eide表示,要使无人机从海底起飞,就需要改变海底系统和运营理念。他说:“为了节省成本,您需要扩大无人机的工作范围。” “您需要新的工具,并且需要调整或更改水下生产系统。您需要更改方程式的两端。新工具必须轻巧,以便无人机可以飞行。海底维修需要更换成较小的零件才能更换。现在可以采用另一种心态-如果某件事关闭了,您只需将其更改即可。那是一种新的哲学。”
 (照片:塞佩姆) (照片:塞佩姆) |
在意大利,塞佩姆一直忙于其Hydrone R,该设备在塞佩姆位于意大利东北部的里雅斯特港附近的水下“游乐公园”中开始了为期六个月的试验。最近宣布,该车辆将于2020年在挪威近海的Equinor进行部署。Equinor代表Njord许可证向Saipem授予了Saipem一项为期10年的海底服务合同,以使用该技术,该技术将从Njord油田恢复生产时开始使用,十年。 Hydrone R被描述为具有AUV功能的混合式ROV,例如它将配备机械手进行干预工作,并且可以在300米长的系绳上工作,以实现全带宽实时控制,但它也可以在海底之间移动距离像AUV一样不受束缚的领域,声音通讯可达4公里。一旦进入工作现场,它就可以切换到高带宽光通信进行监督操作。 Hydrone可以根据任务从海底车库或地面部署系统进行部署。 Saipem的技术经理Stefano Maggio说,它的额定高度为3,000米,可以在不使用绳索的情况下运行8-10个小时,并且可以延伸10公里。 Maggio说,由于不需要海底基础设施,因此从地面主机进行部署可能会更容易。 “您可能对部署的天气条件敏感,但是维护能力却很容易。”但是,“海底居民系统对天气不敏感,因此您要部署它,并在恢复之前每年在那里呆六个月。但是,这意味着您无法定期维护它,因此需要最高的可靠性。” |


-168147 "布莱克福德海豚号半潜式钻井平台(图片来源:海豚钻井公司)")
-168002 "(图片来源:SLB)")

-167897 "Transocean Barents 半潜式钻井平台(图片来源:Transocean)")
-167856 "(图片来源:埃尼集团)")

-167727 "环球旅行者一号钻井船(图片来源:诺布尔公司)")
-167623 "(图片来源:Dominion Energy)")

-167415 "Stella Energy 1 MOPU(图片来源:Drydocks World)")

-167309 "West Capella钻井船(图片来源:Seadrill)")
-167178 "(图片来源:Brava Energia)")
-166941 "(图片来源:Ulstein Verft)")