提升管道检查游戏
-109094 "XOCEAN的XO-450(照片:XOCEAN)")
管道检查业务正在发生重大变化。越来越多的远程驾驶汽车(ROV),数字愿望和无人水面舰艇(USV)正在推动数据采集和可交付成果的新时代。
它为运营商可以在其管道上获取的新见解提供了革命性的东西,同时减少了海上活动的时间。
Equinor,Shell和BP是在该领域开展业务的公司。推动因素一直在降低成本,并最大程度地减少安全风险。这是该领域的最新进展,Equinor管道测绘和地理信息顾问Tom Glancy在十月水文学会在阿伯丁举行的会议上概述了这一过程。
他说,在他自己的职业生涯中,远程车辆操作已经从无人值守的载人潜水器(使人处于危险中)变为ROV,再到无人水下航行器(UUV,通常称为自动水下航行器/ AUV,而并非完全自主)。贪婪)。虽然转向遥控潜水器使人类摆脱了风险,但将其连接到支持船的系绳限制了其范围。 AUV意味着可以更快地进行调查,但是,如果发现问题,则AUV无法停止并进行详细的现场评估。
最近的发展方向是快速ROV。 Glancy表示,Equinor与两个主要提供商(使用Superior ROV的DeepOcean)以及与Surveyor Interceptor ROV的Reach Subsea达成了协议。 Glancy表示,虽然两者都受束缚,但它们的探测速度比ROV快,为4节(kt),而不是2kt,这部分归功于其板载高清成像和激光封装。但是,这确实也意味着它们会附带一艘支援船-以及随之而来的间接费用。
这些快速的ROV已成为一种流行的工具,完全改变了传统的管道检查工作流程。 “在过去的二十三年中,管道检查是相对简单的工作流程;壳牌高级项目测量师卡卢姆·桑德(Calum Shand)于今年初在阿伯丁告诉《离岸欧洲》,此次活动由两名承包商聘用,分别进行了两次调查。首先,地球物理勘测船在露天水管段上拖曳带有侧面扫描声纳的遥控拖曳车(ROTV)。然后创建异常报告,从而需要进行第二次调查,在该调查中,工作级ROV(带有DP2级船)进行现场潜水并获取录像带,然后将其用于计划进一步的整改。但是,“使用两船战役既耗时又效率低下,” Shand说。
 高级SROV(照片:DeepOcean)
高级SROV(照片:DeepOcean)
提高效率
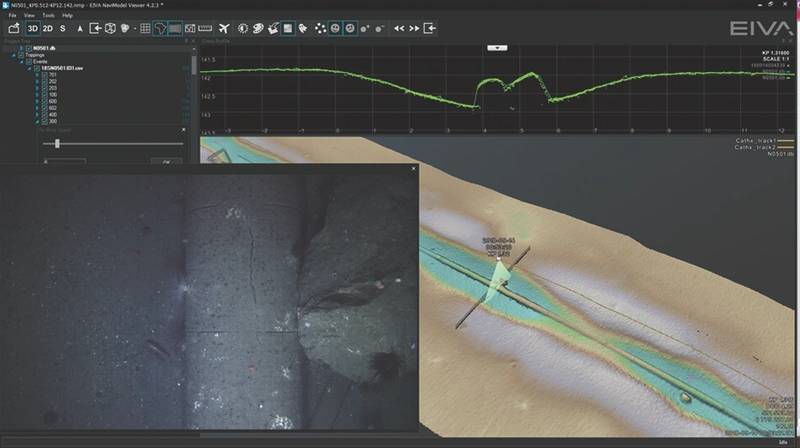
对于拥有200多个管道和脐带缆,总长3,000公里(千米)的壳牌公司而言,仅在英国北海,更轻松,更快速的勘测是一项切实的好处。 2018年,壳牌使用DeepOcean的“快速数字成像服务”进行了一项新调查。这涉及从2018年9月开始的45天不间断战役中,由Edda Flora船运营的具有自动跟踪功能的Kyst Design SuperiorROV。Superior配备Teledyne双头多波束回声测深仪,Edgetech侧面扫描声纳以及子底部轮廓仪,管道跟踪器,CathX超高清(UHD)摄像机(x3)和高规格惯性导航。尚德说,能够将船只下水到4.5米的海域意味着可以在本季节初开始工作,直到深秋才开始工作,声学模式的速度为5kt,管道检查的速度为3.5-4kt。
尚德说,此外,具有侧面扫描声纳意味着该船可以脱离管道勘测以执行“临时飞越作业”,例如在Shearwater油田进行的自升式钻机现场勘测。但是,最大的好处是CathX系统创建的UHD静止图像,实现了“难以置信的细节”。他说:“放大时,会呈现出亚厘米的细节,并可以推断出发生了什么,例如在管道顶部因捕鱼干扰而得分。”
他说,这些超高清照片结合高分辨率多光束测深数据,提供了一种全新的方式,可以通过3D网格模型和色点云查看事件和异常,并可以自动比较年度调查数据集。 Shand说:“这些数据集引起了极大轰动。” “这是一个根本性的改变。”
 图片:壳牌)
图片:壳牌)
数据驱动决策
使用此功能,修复也可以更快。例如,在发现新的管道自由跨度时,壳牌公司能够导出泥梁数据并将其传递给承包商Van Oord,后者能够准确计算所需的岩石量。更重要的是,管道工程师现在具有更好的能力,可以将遗留的“已建成”信息与最近“已找到”的多光束数据进行比较。
今年[2019],壳牌再次退出,这次是使用配备MMT和Kyst并配备了动臂的Surveyor拦截器车辆与Reach Subsea一起退出。这些可以更好地覆盖管道。 Shand说:“我们已经从使用两艘船进行一次战役变成了使用单个船/承包商进行一次战役。” “与以前的做法相比,我们节省了约80万英镑(100万美元),因此减少了二氧化碳排放量”,这很大程度上要归功于船舶时间减少了50%。
Shand补充说,这是一条学习曲线,尤其是在尝试自动执行关联的数据处理然后处理大量生成的数据方面。与行为和工作流有关,以不同方式完成这项工作也存在一些障碍。但是,Shand说,潜力是巨大的,包括将外部,GIS链接的3D建模调查数据与CAD模型以及内部管道检查数据集成在一起,从而可以对整个管道系统进行强大的查看。 Shand说,将机器视觉和深度学习添加到自动检测岩石,碎屑,擦伤等的地方,将能够实现更高的自动化操作和更大的预测分析能力,而不是被动操作。
 图片:壳牌)
图片:壳牌)
快速数字成像检查
快速数字成像检查(FDII)从视频过渡到数字,可以实现自动事件处理并提高检查速度,这也是BP的推动力。英国石油公司高级技术专家埃里克·普里默瑙(Eric Primeau)在阿伯丁举行的Subsea UK水下机器人大会上说,这是采取自下而上的方法,选择传感器包装,然后包装该包装的车辆继续行驶,而不是先选择车辆。
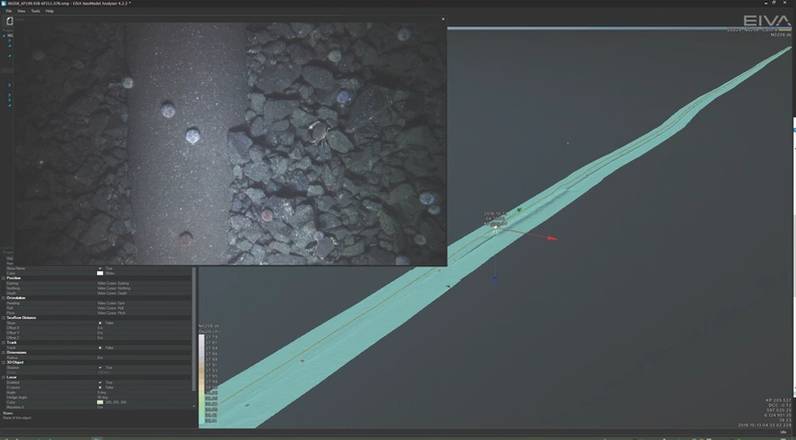
该公司于2017年与DeepOcean进行了首次FDII活动,进行了478公里的管道检查,配备了UHD数字成像,激光,双头多光束和侧面扫描声纳,平均速度为5.1公里/小时。该项目在94.7小时内完成,而传统方法预测为578小时。最终数据包括3D网格和彩色激光点云。
BP在2018年又开展了两次活动,分别是MMT和i-Tech7,然后在2019年又进行了一次活动,再次是i-Tech7。在这些项目中,BP还一直在测试非接触场梯度阴极保护传感器。但是,像Shand一样,处理通过这种方法收集的数据一直是一个挑战。
 图片:BP)
图片:BP)
没有载人水面船只
然而,这种方法仍然需要使用有人驾驶的支持船。因此,运营商一直在跟踪使用USV进行管道检查。今年早些时候(2019年),BP尝试使用XOCEAN XO-450 USV进行管道检查,这是北海的首例。 BP在苏格兰东北部的彼得黑德(Peterhead)部署USV,调查了30英寸废弃米勒出口管道的浅水段。在第二次运行中,从一段仅2.5m的水深到一段长达4.75 km的管道的40m深度,USV配备了R2Sonics双头多光束系统,Valeport SWiFT声速剖面仪和Applanix POSMV OceanMaster,可用于车辆航向,姿态,升沉和速度。
Miller项目的成功使BP委托该系统在阿塞拜疆的里海部署了相同的系统,以检查数百公里的浅水管道(水深12-25m)。 “随着USV使用量的增加和功能的发展,离岸行业正处于巨大变革的风口浪尖。使用载人船进行例行检查具有挑战性。” Primeau说。 “ USV正在成为执行高分辨率海底调查的标准工具,并且它也是开发互补水下系统(如ROV和AUV的集成)的门户。”
尚德说,壳牌公司也一直在研究USV,在2019年的一次短期试验中测试了阿伯丁北部沿海地区的XOCEAN XO-450。在这里,虽然数据和带宽将是一个挑战,但5G的推出和使用他说,云将有所帮助,为实时检查和分析打开了大门。
Equinor还一直在使用USV进行管道勘测。 2019年9月,XOCEAN完成了英格兰东海岸和德国北海岸附近Equinor的管道勘测工作。 XOCEAN表示,使用MBES,对2至40米水深下长度为120英里的四条管道进行了调查。另一艘USV船舶运营商4D Ocean公司已于今年初使用船体安装式MBES对Equinor进行了近海检验。
XOCEAN还在2019年9月完成了它声称是USV的首次拖曳阴极阴极保护(TWCP)管道勘测。这涉及TWCP和多束声纳的勘测,用于PX Group在设得兰群岛附近海岸9公里处的管道上。离阿伯丁郡海岸不远。 PX集团为北海中游合作伙伴运营和维护圣费格斯天然气码头和相关的Frigg UK和设得兰岛区域性天然气出口系统(SIRGE)的海上管道,这些管道将阿伯丁郡的设施与北海连接起来。
 图片:壳牌)
图片:壳牌)
将USV与AUV组合
但是,USV上的传感器只能到达这么深。如果要对USV做更深的输水管道调查,则需要一种替代方法。这意味着从USV部署AUV-这就是太古海底为挪威Equinor所做的工作。 2018年10月,在两个项目的第一个项目中,它部署了Kongsberg Hugin AUV和一艘小型水面船只,使其能够保持位置更新并与卑尔根的控制人员进行通信。检查是在Kollsnes(一家陆上工厂)和Troll A(距卑尔根仅65公里)之间的三条管道上进行的。在两次水下航行器潜水中,总共检查了180公里的管道,并获得了测深,合成孔径声纳和高清图像数据,以验证海底管道的完整性。
2019年7月,太古公司声称“首次在地平线上进行了完全无人值守的海上管道检查”,该勘测距海岸不超过100公里,再次为Equinor进行。看到了带有MBES,侧面扫描声纳和CathX摄像系统的Hugin,与英国Hushcraft公司制造的SEA-KIT Maxlimer USV结合使用。再次使用测深,合成孔径声纳和高清图像数据对总长175 km的四条管道进行了调查。使用SEA-KIT Maxlimer意味着Hugin可以在海上停留更长的时间,在USV的海上停靠进行充电,以及将其用作到卑尔根偏远中心的通信和控制链接。太古公司表示,通过使用小型无人船,燃料使用量和碳排放量减少了95%。汤姆·格兰西(Tom Glancy)则提出了另一种方式–将离岸人员减少了100%。他的最终目标是根本没有水面船只。
[编者注:太古海洋开发公司(SPO)于11月宣布,由于油田服务公司继续感受到行业陷入低迷的影响,它将从2020年2月底起关闭其太古海底公司的子公司。太古海底公司目前管理的船只将作为新加坡SPO船队的一部分进行运营和销售。]
 SEA-KIT装有Hugin AUV,用于远程管道操作。 (照片:太古海底)
SEA-KIT装有Hugin AUV,用于远程管道操作。 (照片:太古海底)
下一步
有些人正在为此工作。在2018年,Modus Seabed Intervention部署了其HAUV(一种改良的Saab Seaeye Sabertooth AUV)在澳大利亚西北部近海进行了约240 km的管道勘测,使用了CathX Scout激光轮廓分析和高清成像以及多波束回声测深仪(MBES)进行了传播。该公司表示,虽然这是通过HAUV在船上的系绳上进行的,以进行实时数据收集,但如果没有系绳,这家有更多项目在进行中的公司也是有可能的。
Oceaneering的Freedom混合动力汽车虽然在海底居民车辆方面得到了很大的推广,但实际上最初是为自动管道勘测而设计的。海洋工程公司的主要目标是拥有一辆高效的空气动力学飞行器,如果发现异常情况,它可以停止并进行额外的检查工作。确实,斯特凡·林德索(SteffanLindsø)在10月在斯塔万格附近举行的一次水下干预无人机演示活动中说,该车辆的第一个项目,即2020年,将是“可能在英国”进行的管道检查。
川崎海底(Kawasaki Subsea)也在测试其第二代汽车,该汽车将管道跟踪技术集成到日本海上进行勘察。今年(2020年)将与DeepStar和Nippon Foundation一起进行管道跟踪测试。管道检查领域一直存在中断,并且还有更多。
机器视觉技术还有助于改善管道勘测的提供方式。作为Subsea 7一部分的i-Tech 7是提供近距离检查快速数字检查服务的公司之一,越来越多地受到自动化的支持。
 (照片:i-Tech 7)
(照片:i-Tech 7)
FDII
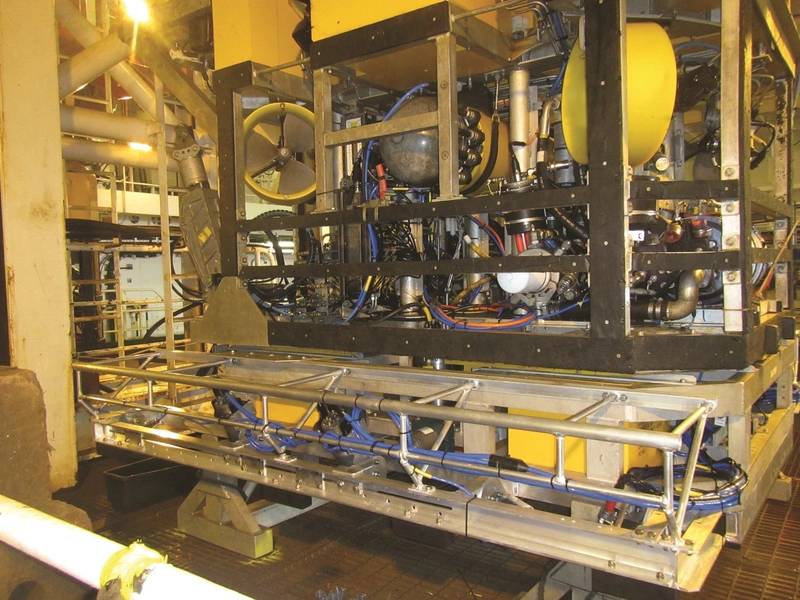
它的快速数字检测管道服务是通过专用滑橇提供的,根据需要的位置,该滑橇可以轻松运输并在其机队的任何工作舱ROV上动员。撬块装有改进的CathX Pathfinder套件,该套件具有三个超高清摄像头-左舷,中央和右舷-激光轮廓仪和一个飞行员摄像头,在静止图像之间同步(安全功能,因此高功率的频闪LED灯不会影响ROV飞行员的视线)。
Danny说,使用像这样的数字影像套件意味着以3-4.5公里/小时的速度运行调查,而传统上以1公里/小时的速度运行以视频为基础的基于视频的调查,可以进行手动事件并避免图像模糊,相比之下, Wake,i-Tech首席测量师7. 2018年,BP进行了一项一般的目视检查项目,该项目涉及8条管道,总长310 km,外加两次结构检查,相对于BP节省了10船日(仅需14天以上)传统的管道检查速度。在2019年针对BP的FDII管道检查活动中实现了同等节省,并带来了有助于减少CO2排放的额外好处。
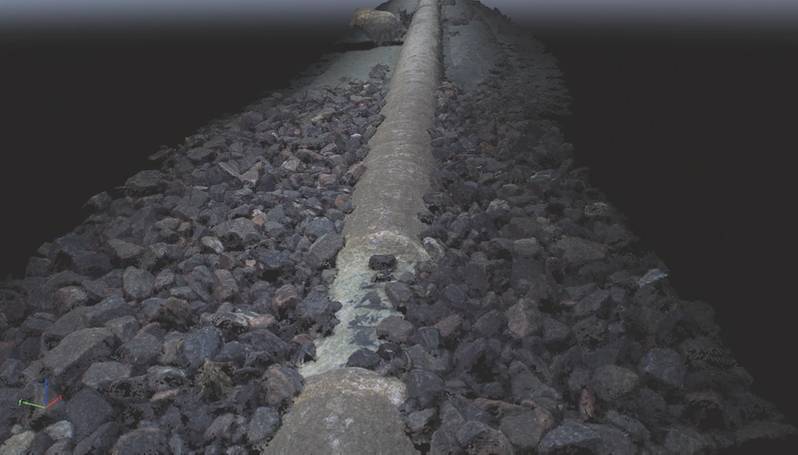
管道工程师还获得了可以在空间上定位的正交矫正和3D模型(而不是像视频一样按顺序定位)。但这还不是全部。 I-Tech 7与美国IT,科技公司Leidos一直在研究如何使数据处理例程自动化以更快地为工程师提供有用信息的方法。例如,自动分析图像以提取包含可能事件的图像,从而大大减少了人类要检查的图像量。 i-Tech 7今年(2019)使用这些技术进行了首次调查。
有趣的是,这是一种不仅限于数字图像的技术。 i-Tech 7的全球检查经理George Gair表示,为数字检查开发的算法中约有60%也可以在视频上使用。
Wake说:“圣杯是自动分类和事件处理。” “我们从机器视觉开始检测可能发生的事件,朝着这一目标迈进,调整算法,提高自动化程度。”此后的下一步是实时检测,使工程师可以更快地访问检查结果,以便他们对它们采取行动。更快速。
 图片:i-Tech 7)
图片:i-Tech 7)
尽管围绕这些类型的技术(包括机器学习)进行了大肆宣传,这些技术使用计算能力来比较数百万张图像并检测特定属性,但这并不是一件容易的事,尤其是在一个喜欢与标准化设计相反的行业中。拥有训练数据(管道图像)也很困难。
但是,盖尔说,发现的管道完整性问题中约有90-95%通常与自由跨度和埋葬风险有关,因此这一直是公司的主要重点。损坏通常是非典型的,将需要更多时间。他说,在此过程的某些部分还将需要人类。
在车辆平台方面,i-Tech 7坚持使用基于ROV的滑橇。 Wake说,虽然使用AUV可以帮助更快地进行测量,但它们往往会在管线上方游动,并且不一定会携带完整的FDII传感器套件,以提供如此全面的管道视图。他说,虽然一直专注于拥有能够在检测到异常情况时停止并收集更多数据的系统,但他使用FDII数据可以在超高分辨率下从更多角度而不是从上方看到管道,工程师已经掌握了所需的所有信息,而无需回去进行更详细的检查。


-168147 "布莱克福德海豚号半潜式钻井平台(图片来源:海豚钻井公司)")
-168002 "(图片来源:SLB)")

-167897 "Transocean Barents 半潜式钻井平台(图片来源:Transocean)")
-167856 "(图片来源:埃尼集团)")

-167727 "环球旅行者一号钻井船(图片来源:诺布尔公司)")
-167623 "(图片来源:Dominion Energy)")

-167415 "Stella Energy 1 MOPU(图片来源:Drydocks World)")

-167309 "West Capella钻井船(图片来源:Seadrill)")
-167178 "(图片来源:Brava Energia)")
-166941 "(图片来源:Ulstein Verft)")