居住的滑动尺度
-99669 "Oceaneering的自由概念,艺术家的印象。 (图片:Oceaneering)")
海底部署的远程操作水下航行器(ROV)已经在这里。自去年年初以来,IKM Subsea一直在挪威海上运营商Equinor的Snorre B生产设施下方的笼子里运营其Merlin UCV R-ROV(驻地ROV)。它由通信和控制供电并连接到Snorre B设施,并在检索维护之前一次部署三个月。通过从海底的笼子操作ROV,发射和恢复操作不再依赖于天气,并且ROV可以在需要时更快地到达现场。此外,它既可以由设施上的ROV操作员操作,也可以通过光缆从斯塔万格附近的陆上控制室操作。
4月,Oceaneering的E-ROV(授权E)将采取不同的策略,在Equinor的检查,维护和维修(IMR)机队中使用船只。使用Oceaneering去年使用其e-Novus ROV演示的概念,电池供电的E-ROV将与IMR船一起运行,部署在需要的地点,以及600米的系绳管理系统和光纤光缆到地面通信网关浮标。这将通过4G LTE从陆上控制室进行通信和控制,使IMR船可以自由地进行其他工作。
尚未商业化的想法将使这些概念更进一步 - 从无人水面舰艇(USV)部署ROV。 Total和TechnipFMC一直在探索与法国ECA集团合作进行轻型海底IMR活动的想法。 ECA集团表示,今年早些时候,使用无线通信链路(地面通信网关)成功演示了使用其USV Inspector部署的Hytec H300V观测级ROV执行检查任务的能力。在运营期间,陆上运营商使用从检查员90 USV部署的ROV对模拟的海底资产进行重复性任务。
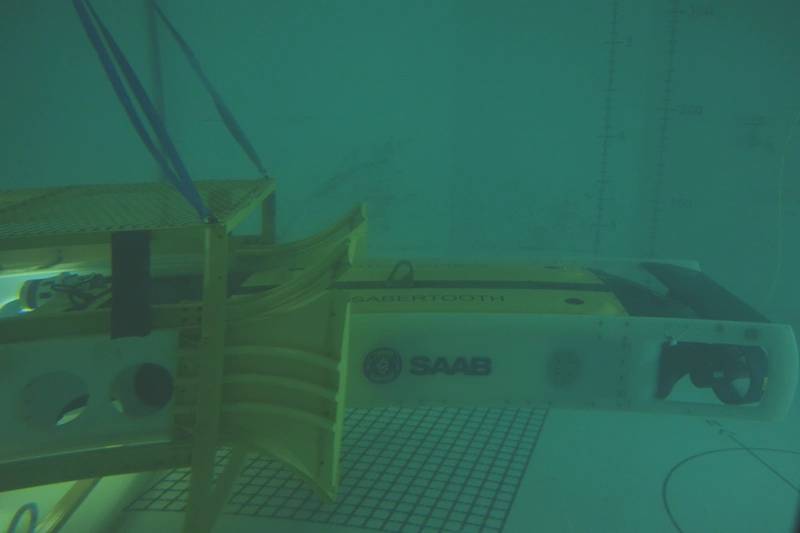
 Saab Seaeye的Sabretooth配备了Blue Logic连接器和经过验证的感应数据和充电(照片:Saab Seaeye)
Saab Seaeye的Sabretooth配备了Blue Logic连接器和经过验证的感应数据和充电(照片:Saab Seaeye)
切断电源线
到目前为止,所有这些系统都依赖于用于电力和通信/控制的系绳,或者在车辆由电池供电的情况下,通信/控制。对于那些想要脱掉绳索的人来说,自主水下航行器(AUV)是指路明灯。
今年早些时候,Saab Seaeye表示,通过展示水下电动汽车可以停靠在远程深水子驻地居民对接站进行数据传输,分配指令和电池充电,它实现了世界首创。
其3000米级的Sabertooth已经可以远程开展预编程或人工控制的任务,包括IMR,研究任务和环境监测。现在,配备了2千瓦/ 80兆比特/秒的Blue Logic感应充电器和数据传输设备,混合动力AUV / ROV能够在Saab Seaeye的测试罐设施中进行试验,对接,充电和下载数据。这意味着它现在可以在任何扩展坞上对接,充电和上传或下载数据 - 包括Equinor提出的标准设计 - 其中有相应的Blue Logic连接,以及更换工具,Saab Seaeye的首席工程师JanSiesjö说道。
“我们已经基于转发器和使用BlueComm进行了对接站和自动对接很长一段时间,但之前没有进行过电源和数据传输。这是完整系统的最后一个缺失部分,可以完成这些常驻工作,“Siesjö说。
另外,Saab Seaeye正在与海洋能源技术公司Ocean Power Technologies(OPT)合作,与OPT的PB3 PowerBuoy作为电源和表面数据共同开发和销售AUV和ROV充电和通信系统的解决方案。网关。对于Siesjö来说,关键的促成因素是表面通信。 “北海大部分地区都有4G,”他说。 “有了这个,突然之间你就可以拥有一个带有通信浮标的坞站或一个支持AUV通信的USV。所有的作品都在那里。“
 Saab Seaeye的Sabretooth在它的测试罐中(照片:Saab Seaeye)
Saab Seaeye的Sabretooth在它的测试罐中(照片:Saab Seaeye)
展示对接
Modus Seabed Intervention将于今年夏天交付其第二艘深水级Sabertooth混合动力AUV(HAUV)。 2017年,该公司进行了示范和试验,其现有的HAUV已准备好在2018年进行商业运营。在2017年的一个试验项目中,HAUV从位于瑞典萨博工厂附近湖边的码头发射,进行“割草”车辆“风格预编程调查收集多波束回声测深仪(MBES),侧扫声纳(SSS)和底层剖面仪(SBP)数据超过15公里,没有来自支持船的外部辅助 - 只是车辆的差异全球定位系统(DGPS),惯性导航系统(INS)和多普勒速度记录(DVL)。该公司首席商务官奈杰尔·沃德(Nigel Ward)说:“外出并重复调查后,它看起来很少漂移。”该车也成功试验了多次,自动对接到其海底车库。
2018年初,英国Blyth的ORE Catapult工厂进行了一项英国Innovate资助风电场居民检查项目的一部分试验,涉及使用Blue Logic电感连接器的间接电源耦合和数据传输。在今年晚些时候的示范项目的最后阶段,在其商业承诺之间,Modus将在英国的海上风电场试用HAUV的居民概念。
 Modus Seabed Intervention的H-AUV在水中(照片:Modus Seabed Intervention)
Modus Seabed Intervention的H-AUV在水中(照片:Modus Seabed Intervention)
去年,Modus在澳大利亚西北部海上部署HAUV,进行超过200公里的管道完整性调查,使用与多波束回声测深仪一起散布的Cathx激光和高清摄像机,生成管道和海洋生物的图像和点云数据。 “调查时间是使用传统ROV进行调查时的一半,而且可能更快,”Modus CCO Nigel Ward说。 “这样的调查可以在没有绳索的情况下进行,但是在这种情况下可以通过系绳进行,以便可以收集实时数据。”Modus也在试用Force Technology的FIG系统,它可以以4节的速度进行非接触式阴极保护测量,同时进行一般视觉检查(GVI)调查。
 Modus Seabed Intervention一直在试验英国境外的对接和驻地车辆运营。 (照片:Modus Seabed Intervention)
Modus Seabed Intervention一直在试验英国境外的对接和驻地车辆运营。 (照片:Modus Seabed Intervention)
 在管道检查期间,Modus Seabed Intervention的H-AUV在管道上捕获了鲨鱼的醒目图像。 (照片:Modus Seabed Intervention)
在管道检查期间,Modus Seabed Intervention的H-AUV在管道上捕获了鲨鱼的醒目图像。 (照片:Modus Seabed Intervention)
Subsea 7的3000米级自动检测车(AIV)与Sabertooth一样能够悬停(用于近距离检查)。这是一款24小时耐力的内场检查车,来自Subsea 7公司i-Tech 7的Alan Gray说道.1.7米长,1.3米宽,0.8米高的车辆(空中750公斤),今年早些时候,他告诉Aberdeen的Subsea Expo,并在去年的18个小时内进行了36次检查,其中锂离子电池往返40公里。他说,它完成了四次海上试验,包括对接,达到了TRL5(技术准备水平)。格雷说,AIV可以通过声学,无线电或4G网络进行通信,可以在从车库进行操作的同时操作中使用,以释放IMR容器用于其他工作。但是,它也是建立在自主权的基础上的。格雷说,它使用与声纳相结合的地图进行导航并拥有一个先进的规划系统,并有一个直观的地图,你可以通过该地图指向并点击计划任务。他说,使用通过水的通信可以让人在循环中完成复杂的任务,尽管在这里还有一些工作要做。
接下来将是Oceaneering的Freedom车辆。 Oceaneering表示,这艘3.3米长的全新设计车辆将能够自动执行检查,高级测量和光干预工作(无绳索长达50公里或带绳索250米)或远程控制,使用模块化设计意味着它可以根据需要进行配置。这将包括一个共同的中心部分,其末端可以互换。 Freedom有一个碳纤维外壳,提供强度和包围其浮力,而不是传统的ROV骨架式结构。
Oceaneering的特别项目ROV运营经理Arve Iversen表示,正在美国建造原型,准备在休斯顿的近海技术会议上展示。之后,它将被运往挪威在特隆赫姆峡湾进行测试。与此同时,挪威已经建立了一个测试车辆,以便在挪威科技大学(NTNU)的帮助下开发控制系统和自主软件。
“今年我们专注于控制,避障,物体识别等等。对接将到来,我们将能够与Equinor开发的扩展坞对接,我们将在特隆赫姆使用它进行对接测试,“Iversen说。 Equinor的扩展坞是一种标准化解决方案,也使用感应式连接器,它希望它可能想要使用的所有海底车辆能够停靠。 “我们认为标准化的扩展坞是前进的方向,”艾弗森说。 “如果每个人都有自己的商业案例很难。”Iversen说,只有17个对接站,由于其范围,整个挪威大陆架可以由Freedom覆盖。
还有更多混合动力AUV项目正在筹备中,包括FlatFish,这是壳牌授权Saipem去年开发的居民自动驾驶汽车,预计到2020年将获得商业应用资格.Saipem还拥有其Hydrone系列汽车。与此同时,回到特隆赫姆,技术分拆Eelume将测试其最新的20厘米直径蛇形机器人EELY500,该机器人具有8个用于推进和稳定的推进器。它已经在特隆赫姆附近的一个峡湾370米处进行了测试。下一步是在操作员的Åsgard油田从Equinor设计的扩展坞进行部署,最初是在一个系绳上,它可以为电池充电并拾取工具。
川崎重工已在阿伯丁成立英国子公司Kawasaki Subsea(英国),该公司致力于开发用于石油和天然气管道检测及后期维护的AUV。其车辆的原型,称为SPICE(近视眼的海底管道检查),于2017年在威廉堡的现已关闭的水下中心进行了测试,并将于2020年在商业上推出,并与英国的Heriot合作开发控制软件。 - 瓦特大学。测试包括将AUV自动对接到原型充电站,非接触式充电和大容量光通信操作。






-168831 "(图片来源:SLB)")

-168732 "插图(图片来源:Borr Drilling)")

-168671 "Stella Energy 1 MOPU(图片来源:Drydocks World)")

-168578 "(图片来源:RWE/Sven Utermöhlen)")